Semua generator dalam pusat listrik menyalurkan energinya ke rel pusat listrik. Demikian pula semua saluran yang mengambil maupun yang mengirim energi dihubungkan ke rel ini.
• Bus bar bertindak sebagai titik hubung yang menghubungkan rangkaian incoming dan
outgoing.
• Bus bar digunakan di GI umumnya berpenampangpersegi (rectangular) atau bulat (circular),
dengan inti pejal (solid) atau berlobang (hollow). Busbar berlobang digunakan pada GI
SUTET (EHV) untuk mengurangi efek korona.
• Skema pensaklaran menyatakan metode yang berbeda untuk merubah rangkaian
dalam sistem tenaga untuk menyalurkan energi listrik secara handal. Skema
pensaklaran membantu menyaluran energi listrik
(manuver) jika terjadi gangguan atau pemeliharaan.
Berbagai jenis susunan busbar yaitu:
a. Rel Tunggal
Ini adalah susunan rel yang paling sederhana dan paling murah. Keandalan serta
fleksibilitas operasi nya sangat terbatas. Apabila ada kerusakan di rel, maka
seluruh pusat listrik harus dipadamkan untuk dapat melakukan perbaikan. Oleh sebab itu,
rel tunggal sebaiknya hanya digunakan pada pusat listrik yang tidak begitu penting
peranannya dalam sistem.
Untuk menaikkan keandalan rel tunggal. PMS seksi dapat dipasang yang
membagi rel dalam dua kelompok, yaitu kelompok kiri dan kelompok kanan dari rel.
Unit pembangkit dan beban sebagian dihubungkan ke kelompok kiri dan sebagian
lagi dihubungkan ke kelompok kanan dari rel. Apabila ada kerusakan pada rel
yang perbaikannya memerlukan pemadaman, maka seksi rel yang memerlu-
kan perbaikan bisa dipadamkan dengan membuka PMS seksi ini sehingga seksi
rel yang sebelahnya tetap bisa dioperasikan/dinyalakan.
• Keuntungannya
> Susunan ini murah instalasinya
> pemeliharaan kurang
> operasionalnya sedernaha
• Kekurangannya
jika ada gangguan pada busbar maka semua elemn yang terhubung juga akan
padam/terlepas demikian pula saat pemeliharaan sehingga kurang fleksibel dan handal
b. Rel Ganda dengan Satu PMT
Rel ganda yang diperlihatkan pada gambar 2.8 adalah rel ganda dengan satu PMT,
selanjutnya hubungan ke rel 1 atau rel 2 dilakukan melalui PMS. Rel ganda pada umumnya
dilengkapi dengan PMT beserta PMS-nya yang berfungsi menghubungkan rel 1 dan rel 2
seperti diperlihatkan pada gambar 2.8. PMT ini disebut sebagai PMT kopel. Dengan
rel ganda, sebagian instalasi dapat dihubungkan ke rel 1 dan sebagian lagi ke rel 2. Kedua
rel tersebut(rel 1 dan rel 2) dapat dihubungkan paralel atau terpisah dengan cara menutup
atau membuka PMT kopel. Dengan cara ini fleksibilitas operasi akan bertambah terutama
sewaktu menghadapi gangguan yang terjadi dalam sistem.
Sebagian dari unit pembangkit atau beban dapat dihubungkan ke rel 1 dan lain-
nya ke rel 2. Apabila salah satu unit pembangkit atau salah satu beban akan pindah rel,
maka terlebih dahulu PMT-nya harus dibuka, kemudian disusul dengan pembukaan
PMS rel yang akan ditinggalkan, baru diikuti pemasukan PMS rel yang dituju; urutannya
tidak boleh dibalik.
Apabila terbalik, maka akan terjadi hubungan paralel antara rel 1 dan rel 2 yang belum tentu
sama tegangannya dan hal demikian adalah berbahaya. Setelah selesai melakukan
pemindahan posisi PMS, baru PMT dimasukkan. Untuk unit pembangkit, pemasukan PMT
harus melalui proses sinkronisasi.
Dari uraian di atas tampak bahwa proses pemindahan beban dari rel satu ke rel
lainnya memerlukan pemadaman, yaitu saat PMT dibuka. Pemindahan beban atau unit
pembangkit dari salah satu rel ke rel lainnya dalam praktek dapat terjadi, misalnya karena
ada kerusakan yang memerlukan pemadaman rel saat perbaikan.
• Keuntungan
> memudahkan pemeliharaan karena beberapa komponen
rangkaian dapat diisolasi
> Cukup fleksibel menghubungkan feeder pada ke dua bus bar
> jika ada dua PMT pada susunan ini akan meningkatkan
kehandalan jika satu PMT terbuka
• Kelemahan
> mahal
> rangkaian terputus pada busbar yang terganggu
c. Rel Ganda dengan Dua PMT
h
Rel ganda dengan dua PMT ini sama seperti rel ganda dengan satu PMT hanya saja disini
semua unsur dapat dihubungkan ke rel 1 atau rel 2 atau dua-duanya melalui PMT
sehingga fleksibilitas manuver menjadi lebih baik. Pemindahan beban dari rel 1 ke rel 2
dapat dilakukan tanpa pemadaman, tidak seperti pada rel ganda dengan satu PMT, seperti
diuraikan pada butir b di atas. Hal ini dapat terjadi karena dengan adanya 2 buah PMT
(masing-masing satu PMT untuk setiap rel) pemindahan beban dilakukan dengan menutup
terlebih dahulu PMT rel yang ditujukan, kemudian membuka PMT rel yang ditinggalkan.
Sebelum melakukan manuver ini, harus diyakinkan terlebih dahulu bahwa rel 1 dan rel 2
tegangannya sama, baik besarnya maupun fasanya. Jika sudah sama, baru PMT dapat
dimasukkan.
c. Rel dengan PMT satu setengah
Pada dasarnya rel dengan PMT satu setengah adalah rel ganda dengan tiga buah PMT
di antara dua rel tersebut. Jika rel-rel ini diberi identifikasi sebagai PMT A1, PMT A2,
dan PMT seterusnya. Sedangkan yang dekat rel B diberi identifikasi sebagai PMT B1,
PMT B2, dan seterusnya. PMT yang ditengah disebut PMT diameter dan diberi identifikasi
sebagai PMT AB1, PMT AB2, dan seterusnya.
Bagian-bagian dari instalasi dihubungkan pada titik-titik yang letaknya antara
PMT A dengan PMT AB dan pada titik-titik yang letaknya antara PMT B dengan PMT AB
seperti terlihat pada gambar 2.10. Dibandingkan dengan rel-rel pada butir a, b dan c
tersebut di atas, rel dengan PMT satu setengah ini memunyai keandalan paling tinggi.
Hal ini dapat dilihat sebagai berikut:
· Apabila Rel A mengalami gangguan
Dengan membuka semua PMT bernomor A beserta PMS-nya, daya tetap bisa disalurkan
secara penuh.
· Apabila Rel B mengalami gangguan
Dengan membuka semua PMT bernomor B beserta PMS-nya, daya tetap bisa disalurkan
secara penuh.
· Apabila Rel A dan Rel B mengalami gangguan
Dengan membuka semua PMT bernomor A dan PMT bernomor B beserta PMS-nya, daya
tetap bisa disalurkan walaupun dengan fleksibilitas pembebanan yang berkurang.
Pembebasan tegangan sebuah(bagian) instalasi yang terhubung ke rel
dengan PMT satu setengah mengharuskan pembukaan dua buah PMT beserta PMS-nya,
yaitu PMT rel dan PMT diameternya. Misalnya untuk unit pembangkit no. 1 yang ter-
hubung ke rel B melalui PMT B1, maka untuk pembebasan tegangannya, yang harus
dibuka adalah PMT B1 dan PMT AB1 beserta PMS-PMS-nya.
• Keuntungan :
-
Pengoperasian yang lebih fleksibel
-
Kehandalan tinggi
-
Saat bus bar terganggu tidak semua rangkaian harus padam
• Kekurangan
-
harga mahal
-
pengaturan relay proteksi kompleks karena PMT yang ditengah harus menangani dua rangkaian dalam dua arah aliran dan herus beroprasi normal


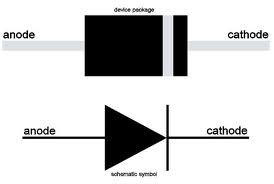 Sifat dioda :
• kalau diberi arah maju (tegangan positif => anoda dan tegangan negatif => katoda) akan menghantarkan arus dan sebaliknya,
Sifat dioda :
• kalau diberi arah maju (tegangan positif => anoda dan tegangan negatif => katoda) akan menghantarkan arus dan sebaliknya,
 • kalau diberi arah mundur (tegangan positif => katoda dan tegangan negatif => anoda) tidak akan menghantarkan arus.
• kalau diberi arah mundur (tegangan positif => katoda dan tegangan negatif => anoda) tidak akan menghantarkan arus.
 Fungsi Dioda :
• Sebagai penyearah
• Sebagai pengaman rangkaian dari kemungkinan terbaliknya polaritas
Mengukur Dioda Dengan Multitester
Putar batas ukur pada Ohmmeter X10 / X100
Fungsi Dioda :
• Sebagai penyearah
• Sebagai pengaman rangkaian dari kemungkinan terbaliknya polaritas
Mengukur Dioda Dengan Multitester
Putar batas ukur pada Ohmmeter X10 / X100
 1. probe merah => katoda, probe hitam => anoda => Jarum bergerak bukan nol.
kemudian posisi dibalik :
probe merah => anoda, probe hitam => katoda, Jarum tdk bergerak
berarti dioda dalam kondisi BAIK.
2. probe merah => katoda, probe hitam => anoda => Jarum bergerak atau menunjuk nol.
kemudian posisi dibalik :
probe merah => anoda, probe hitam => katoda => Jarum bergerak atau menunjuk nol
berarti dioda dalam kondisi RUSAK / SHORT.
4. DIODA ZENER
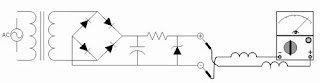
Terbuat dari bahan silikon. Biasanya digunakan pada rangkaian power supply dimana fungsinya adalah sebagai penstabil arus. Meskipun arus AC yang dirubah ke DC berubah-ubah, tidak akan berpengaruh jika terdapat dioda zener ini.
Adapun sifatnya adalah sebagai berikut :
• Tegangan yang dicapai maksimal rata-rata 0,7 s/d 12 volt
• Hanya tahan terhadap arus kecil, maksimal 1 s/d 50 mA
• Hampir tidak ada tegangan yang hilang jika sudah melewati dioda zener.
Contoh dioda zener : zener 6 volt, zener 12 volt, dll
1. probe merah => katoda, probe hitam => anoda => Jarum bergerak bukan nol.
kemudian posisi dibalik :
probe merah => anoda, probe hitam => katoda, Jarum tdk bergerak
berarti dioda dalam kondisi BAIK.
2. probe merah => katoda, probe hitam => anoda => Jarum bergerak atau menunjuk nol.
kemudian posisi dibalik :
probe merah => anoda, probe hitam => katoda => Jarum bergerak atau menunjuk nol
berarti dioda dalam kondisi RUSAK / SHORT.
4. DIODA ZENER
Terbuat dari bahan silikon. Biasanya digunakan pada rangkaian power supply dimana fungsinya adalah sebagai penstabil arus. Meskipun arus AC yang dirubah ke DC berubah-ubah, tidak akan berpengaruh jika terdapat dioda zener ini.
Adapun sifatnya adalah sebagai berikut :
• Tegangan yang dicapai maksimal rata-rata 0,7 s/d 12 volt
• Hanya tahan terhadap arus kecil, maksimal 1 s/d 50 mA
• Hampir tidak ada tegangan yang hilang jika sudah melewati dioda zener.
Contoh dioda zener : zener 6 volt, zener 12 volt, dll
 Pengukuran baik tidaknya dioda zener sama dengan pengukuran dioda biasa.
Aplikasi dalam rangkaian :
Pengukuran baik tidaknya dioda zener sama dengan pengukuran dioda biasa.
Aplikasi dalam rangkaian :
 Semoga artikel Mengenal Komponen Dioda danMengetahui kondisinya ini bermanfaat.
Semoga artikel Mengenal Komponen Dioda danMengetahui kondisinya ini bermanfaat.



















